Quadruped Roboter mit Arduino
Roboter sind eine faszinierende Sache. Was noch vor wenigen Jahren ausschließlich in Hightech-Laboratorien möglich war, ist dank der Arduino-Plattform jetzt in jedem „Heimlabor“ möglich.
Man benötigt entsprechende Bauteile, die Arduino Entwicklungsumgebung und etwas Geduld. Wer den schweren Weg gehen möchte, der muss sich vorab gehörig Gedanken über benötigte Bauteile und deren Verschaltung machen. Das ist kein Projekt für Einsteiger, sondern eher für Profis.
Wir möchten einen frustfreien Einstieg in die Welt der Robotik bieten und stellen euch einen Quadruped Roboter Bausatz vor, der bis auf die Energieversorgung wirklich alles zur Verfügung stellt. Das Ganze zu einem Preis, den man bei Kauf aller Einzelteile mit Sicherheit deutlich überschreiten würde. Was die Energieversorgung angeht, ersparen wir euch das Kopfzerbrechen natürlich auch und präsentieren den passenden Satz Akkus gleich mit.
Quadruped Roboter Bausatz
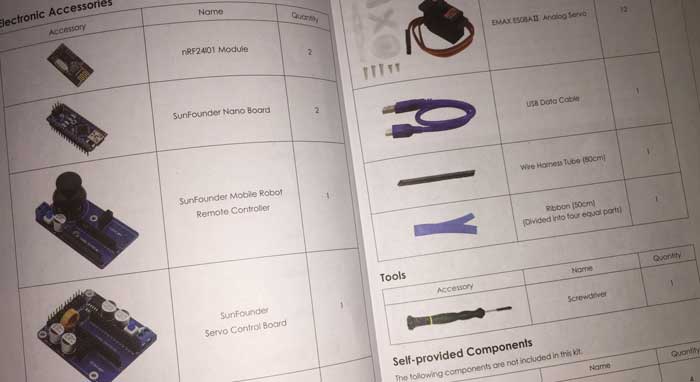
Der Quadruped Roboter Bausatz bringt bis ins letzte Detail alle Teile mit. Selbst ein Schraubendreher ist dabei. Diesen empfehlen wir allerdings durch ein etwas professionelleres Set zu ersetzen. Wer Gefallen an der Robotik findet, wird die Schraubendreher vielfach verwenden.
Keine Produkte gefunden.
-

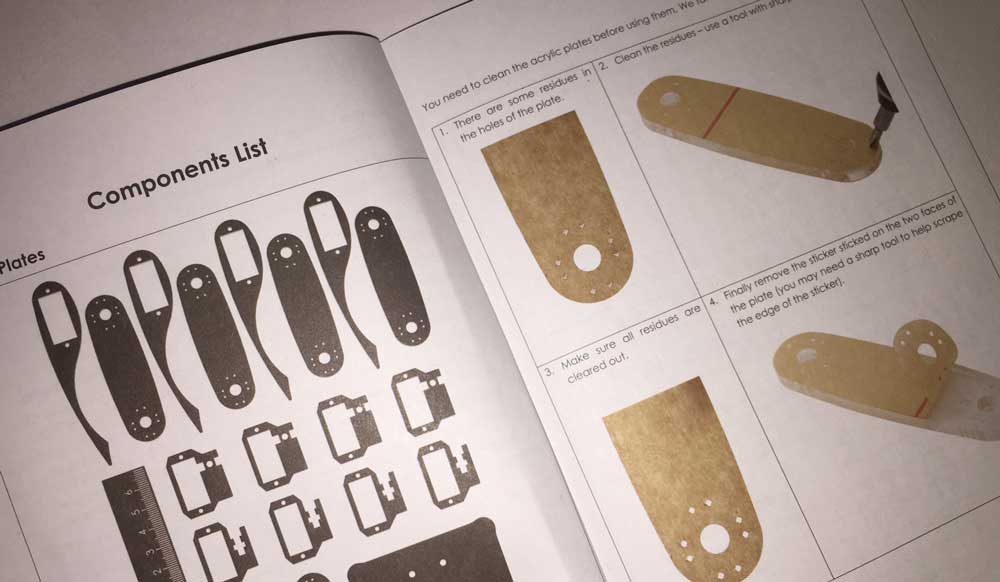
- Komponenten Liste
Keine Angst vor der Anleitung, die in Englisch gehalten ist. Etwas Grundwissen und Google helfen, wenn die Zeichnungen nicht mehr ausreichen.
Wenn Ihr den Roboter Bausatz bestellt, solltet Ihr euch unbedingt die passenden Akkus gleich mit bestellen.
Keine Produkte gefunden.
Man sollte das Projekt in mehrere Etappen einteilen. Einen reinen Bauteil und einen Teil Programmierung.
Zusammenbau des Roboters
Es empfiehlt sich, die Anleitung einmal komplett zu lesen und sich mit den einzelnen Schritten auseinander zu setzen.
Test der Servo Motoren
Zunächst muss man sich von der Seite des Herstellers eine ZIP-Datei laden, die Bibliotheken zur Ansteuerung der Bauteile enthält. Die Arduino IDE sollte bereits installiert sein. Jett kann man die heruntergeladene ZIP Datei entpacken und in der Arduino IDE die Bibliotheken FlexTimer2 und RF24 (kann sich bei Nachfolgemodellen ändern) für die Ansteuerung importieren.
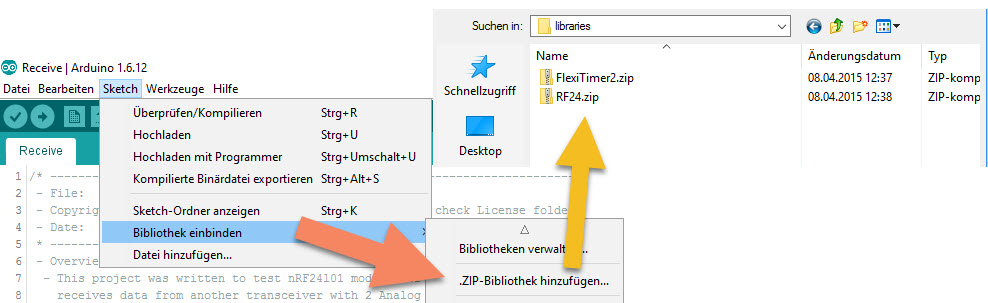
Bibliotheken in Arduino IDE importieren
Jetzt wird der Arduino Sketch Servo.ino geladen. Alle Servo-Motoren werden jetzt nacheinander an den Arduino angeschlossen der über eine externe Energieversorgung mit Spannung versorgt wird. Mit dem mitgelieferten USB-Kabel schließen wir den Arduino an und überspielen das Arduino Sketch. Die Beschreibung erklärt genau, worauf zu achten ist. Alle Servo-Motoren werden so auf einwandfreie Funktion getestet.
Test der Fernsteuerung
Der Quadruped Roboter wird mittels einer Fernsteuerung bedient. Diese besteht im Wesentlichen aus dem nRF224L01 Sender und einem Arduino Nano. Der Zusammenbau ist schnell erledigt. Jetzt wird der Nano mit dem USB Kabel mit dem PC verbunden und der Sketch Transmit.ino übertragen. Im Seriellen Monitor der Arduino IDE seht ihr jetzt, wenn der Stick an der Fernsteuerung bewegt wird.
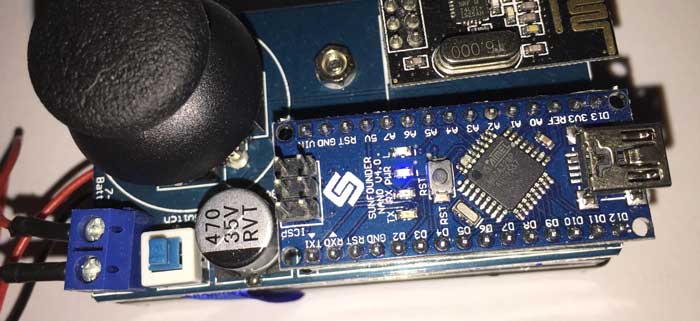
Remote-Control Quadruped
Aufbau der Mechanik
Dieser Teil nimmt Zeit in etwa 4 Stunden Zeit Anspruch. Wer hier sorgfältig arbeitet, kann sich eine Menge Frust ersparen. Frust der später entsteht, wenn der Roboter aufgrund falscher Verbindungen nicht oder nicht korrekt arbeitet.
Die Plexiglas-Anteile der Roboterkörpers enthalten vorgebohrte Löcher, in denen recht häufig noch Reste stecken. Diese muss man präzise säubern um die kleinen Schräubchen ordentlich festdrehen zu können. Ein kleiner Schraubendreher hilft dabei. Schrauben gibt es übrigens massenhaft. Alle wollen befestigt werden und das erklärt auch den hohen Zeitaufwand beim Zusammenbau. Mechanisch gesehen täten es auch weniger Schrauben, allerdings „isst“ das Auge mit.
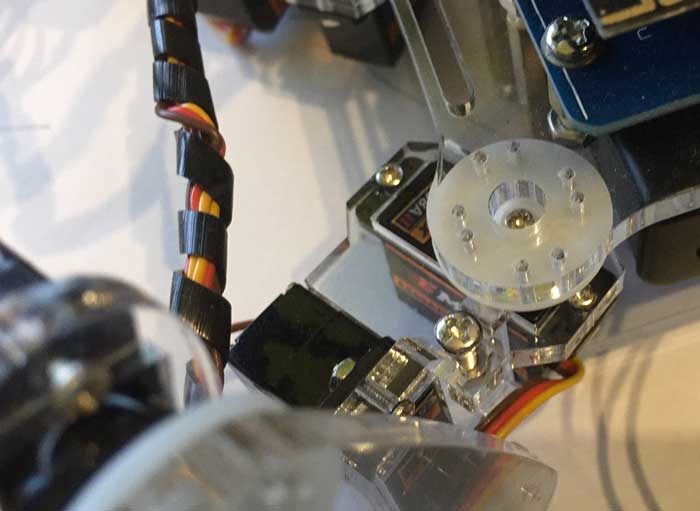
Viele Schrauben wollen befestigt werden
Alles geht leicht von der Hand, die Zeichnungen im Handbüchlein sind gut und verständlich. Der englische Text wird meist nicht benötigt. Am Ende des Zusammenbaus gilt es noch einmal hoch konzentriert zu arbeiten. Die Verkabelung der insgesamt 12 Servomotoren will ordentlich gemacht sein.
Der fertige Quadruped Roboter ist ein echter Hingucker und wird in den Zeiten, in denen er nicht verwendet wird, jedes Regal mehr als schmücken!
Kalibrierung des Quadruped Roboters
Bevor der Quadruped Roboter durch seine spinnenhafte Art der Fortbewegung für Staunen sorgt, müssen Mechanik und Servos kalibriert werden. Hier gilt es ebenfalls hoch konzentriert ans Werk zu gehen.
Wer die Anleitung gewissenhaft beachtet, ist in 115 Minuten mit dem Kalibrieren des Roboters fertig. Zunächst wird der Roboter via USB-Kabel mit dem PC verbunden. In der Arduino IDE wird jetzt der Sketch Crawler.ino geladen.
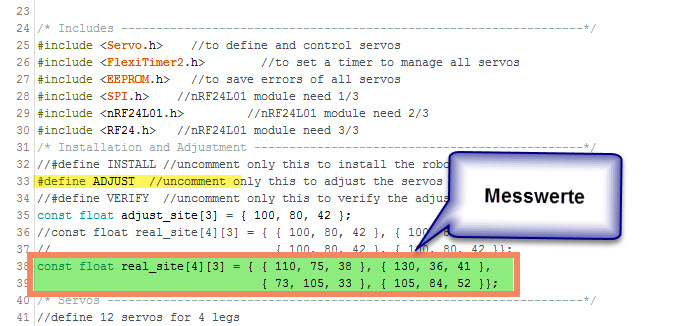
Im Sketch muss in Zeile 33 die Zeile #define ADJUST entkommentiert werden. Die Zeilen 32 und 34 werden auskommentiert.
Roboter kalibrieren
Der Code wird kompiliert und an den Arduino übertragen. Der Roboter nimmt daraufhin eine spezielle Pose ein.
/* Installation and Adjustment – ---------------------------------------------*/
//#define INSTALL //uncomment only this to install the robot
#define ADJUST //<<< Pose zum Kalibrieren einnehmen
//#define VERIFY //uncomment only this to verify the adjustment
//In diesem Array stehen die Referenzwerte, die nach dem Kalibrieren
//im Schritt Verify tatsächlich gemessen werden sollten.
const float adjust_site[3] = { 100, 80, 42 };
//In dieses Array trägt man gemäß Anleitung die tatsächlich mit der Kalibrierungsvorlage
//ermitelten Werte im Schritt Adjust ein.
const float real_site[4][3] = { { 110, 75, 38 }, { 130, 36, 41 },
{ 73, 105, 33 }, { 105, 84, 52 }};
Jetzt wird der Roboter eingemessen und die ermittelten Werte werden gemäß der Anleitung in das Sketch (array real_site[4][3]) eingetragen.
Mit diesen Messwerten kann unser Sketch jetzt die tatsächliche Position berechnen und die Beine des Quadruped Roboters präzise ansteuern.
Nachdem wir die Messdaten übernommen haben, werden wir einen Prüfschritt (Verify) ausführen. Dazu wird die Zeile 33 auskommentiert und die Zeile 34 durch Entfernen der Kommentarzeichen aktiviert.
/* Installation and Adjustment – ---------------------------------------------*/ //#define INSTALL //uncomment only this to install the robot //#define ADJUST //uncomment only this to adjust the servos #define VERIFY //uncomment only this to verify the adjustment
Wir überspielen das Sketch, woraufhin der Roboter wieder eine bestimmte Pose einnimmt. Der Roboter wird auf den Kalibrierungsbogen gestellt und die Achsen werden vermessen. Die Koordinaten der 4 Beine sollten weniger als 10 mm von den Werten in adjust_site[3] abweichen. Also x,y,z – Werte von 100, 80, 42 aufweisen. Wenn dem nicht so ist, muss der Schritt Kalibrierung von oben nochmals wiederholt werden. Passt alles, kann es weiter gehen.
Quadruped Roboter fernsteuern
Sofern wird die Kalibrierung erfolgreich beendet haben, können wir das Sketch mit den ermittelten Messwerten übertragen. Dabei werden alle 3 Zeilen (32,33 und 33) auskommentiert!
/* Installation and Adjustment – ---------------------------------------------*/ //#define INSTALL //uncomment only this to install the robot //#define ADJUST //uncomment only this to adjust the servos //#define VERIFY //uncomment only this to verify the adjustment
In einem letzten Schritt übertragen wird den Sketch Remoter.ino an unseren Arduino Nano auf der Fernsteuerung.
Wenn alles geklappt hat, kannst du die Fernsteuerung anschalten, den Quadruped Roboter aktivieren und in durch die Wohnung manövrieren.
Tipps zum Quadruped Roboter
Sieh Dir die Sketche genau an und versuche zu verstehen, was dort vor sich geht. Zumindest die Programmkonstrukte sollten klar sein.
Stelle Dir folgende Frage:
- Wie werden Variablen definiert, wie Konstanten und Arrays?
- Wie werden #define Anweisungen im Sketch eingesetzt, um beim Kompilieren bestimmte Teile zu deaktivieren bzw. zu aktivieren?
- Was ist der Sinn der loop() Funktion?
- Was hat es mit while(1) auf sich?
- Wie durchläuft man ein Array?
Im ZIP Archiv CD.zip (Seite des Herstellers) findest Du das Dokument Code Explaination for Quadruped Crawling Robot Kit for Arduino.pdf. In diesem Dokument wird Dir der Programmcode und die zugrunde liegende Mathematik für die Berechnung der Beinbewegung erläutert.
Unter anderem werden kartesische Koordinaten in Polarkoordinaten umgewandelt. Das Dokument zeigt, dass die Bewegung gar nicht so einfach ist. Schließlich sorgt ausschließlich die Spitze des Spinnenbeins für die Fortbewegung. Die Position der Spitze wird jedoch durch das Zusammenspiel von jeweils 3 Servos festgelegt.
Wir haben eine Liste mit Literatur zum Arduino zusammengestellt, mit deren Hilfe es Dir gelingen sollte, den Code im Wesentlichen zu verstehen und Ideen zu entwickeln den Quadruped Roboter zu erweitern.
Das brauchst Du für den Bau des Roboters
- Arduino IDE zum Übertragen der Sketches an die Arduinos
- Keine Produkte gefunden.
- Keine Produkte gefunden.
- Optional: Schraubendreher-Set
Kosten: inkl. Schraubendreher-Set etwa 140 bis 150 EURO
Zeitansatz: Etwa 6 bis 8 Stunden
Schwierigkeitsgrad: Leicht bis mittelschwer
Letzte Aktualisierung am 14.01.2023 / Affiliate Links / Bilder von der Amazon Product Advertising API

![Arduino UNO Rev3 [A000066]](https://www.electastic.com/wp-content/plugins/aawp/public/image.php?url=aHR0cHM6Ly9tLm1lZGlhLWFtYXpvbi5jb20vaW1hZ2VzL0kvNTF0eFcxaWljVkwuanBn)